
CuGoをROSで制御する際、ROS開発キットに付属するArduinoのリファレンススケッチです。セットでROSアプリと同時に使用します。
ROSpkgのリポジトリはこちら:https://github.com/CuboRex-Development/cugo-ros-controller
このArduinoスケッチはROS開発キット専用です。クローラロボット開発プラットフォームの方はこちらを参照してください:https://github.com/CuboRex-Development/cugo_ros_motorcontroller/tree/pico-usb
CuGo-ROS-Controller-pkgと使うと/cmd_velのベクトルをそれぞれL/Rの回転数に変換しrpmとしてArduinoに送られてきます。その必要rpmを達成する制御をこのCuGO-ROS-ArduinoDriverで実施します。
また、CuGoROS開発キット付属のMC-8のプロポを用いて、RC操作と自律走行の切り替えを実施できます。左スティックを左に倒すことでラジコン操作を受け付けるRC-MODEに、右に倒すことでROSの速度ベクトルをCuGoに伝えるROS-MODEに切り替えることができます。自律走行中に、誤った判断をし障害物に衝突しそうなシーンでは、コントローラよりRC-MODEに変更することでラジコン操作に即時に切り替えることができ、緊急停止と同じ操作ができます。

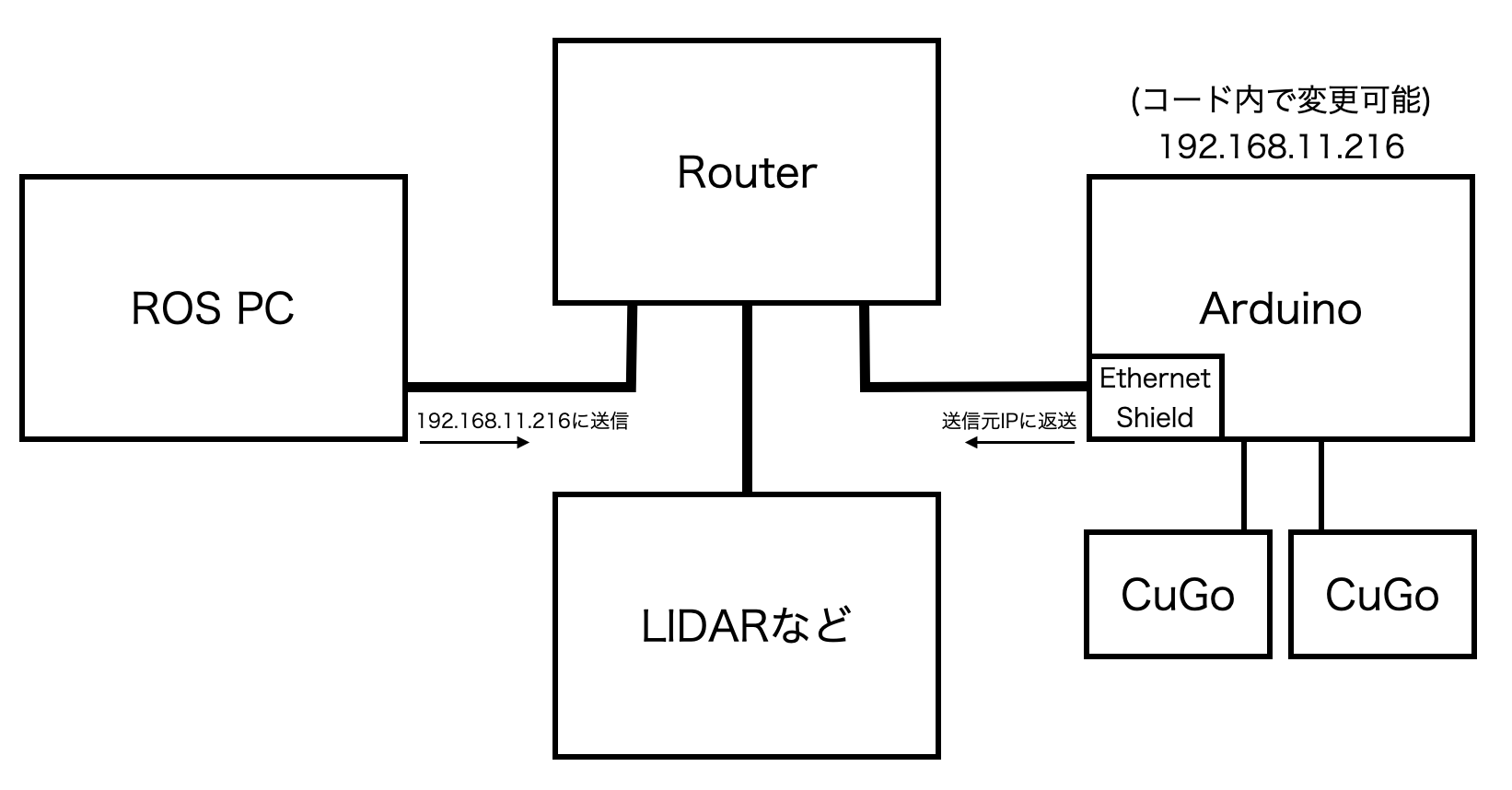
ROSを使用したロボットシステムでは、以下の図のように、LinuxPCとの通信はEthernetを使用したUDPプロトコルで行います。ROS開発キット以外でご活用の際には、PC-Arduinoの間にIPを割り振るDHCPサーバの機能があるルータを挟むか、PC-Arduino間で名前解決する構造にしてください。
ハードウェア
- ArduinoUno / Uno準拠ボード
- Ethernet Shield2 / 準拠ボード
Arduino標準ライブラリ
- Servo.h
- SPI.h
- Ethernet2.h
- EthernetUdp2.h
Arduino標準IDEを使用していれば、依存ライブラリのインストールは必要ありません。
cugo-ros-arduinodriver.inoのコード上部にある設定係数を入力して、ArduinoIDEで書き込みを行ってください。
設定できる項目は以下の通りです。
// シリアル通信での情報の表示有無
bool UDP_CONNECTION_DISPLAY = false;
bool ENCODER_DISPLAY = true;
bool PID_CONTROLL_DISPLAY = false;
bool FAIL_SAFE_DISPLAY = true;
// Ethernet Shield に印刷されている6桁の番号を入れてください。なお、ロボット内ローカル環境動作なので、そのままでもOK。
byte mac[] = {0x02, 0x00, 0x00, 0x00, 0x00, 0x00}; // お持ちのArduinoShield相当の端末のアドレスを記入
// ROSアプリケーションと同じ値にしてください。
IPAddress ip(192, 168, 8, 216); // Arduinoのアドレス。LAN内でかぶらない値にすること。
unsigned int localPort = 8888; // 8888番ポートを聞いて待つ
// PID ゲイン調整
// L側
//const float L_KP = 1.5; // CuGoV3
//const float L_KI = 0.02; // CuGoV3
//const float L_KD = 0.1; // CuGoV3
const float L_KP = 1.0; // MEGA
const float L_KI = 0.06; // MEGA
const float L_KD = 0.1; // MEGA
// R側
const float R_KP = 1.0; // MEGA
const float R_KI = 0.06; // MEGA
const float R_KD = 0.1; // MEGA
//const float R_KP = 1.5; // CuGoV3
//const float R_KI = 0.02; // CuGoV3
//const float R_KD = 0.1; // CuGoV3
// ローパスフィルタ
const float L_LPF = 0.95;
const float R_LPF = 0.95;
// 回転方向ソフトウェア切り替え
const bool L_reverse = true;
const bool R_reverse = false;
クローラ走行の振動が非常に大きいので、RJ45端子のEthernetケーブルでの通信 / WiFi接続による通信をお勧めします。 シリアル通信ものちに対応予定です。
このプロジェクトはApache License 2.0のもと、公開されています。詳細はLICENSEをご覧ください。